Hand Vise-Inventor Project
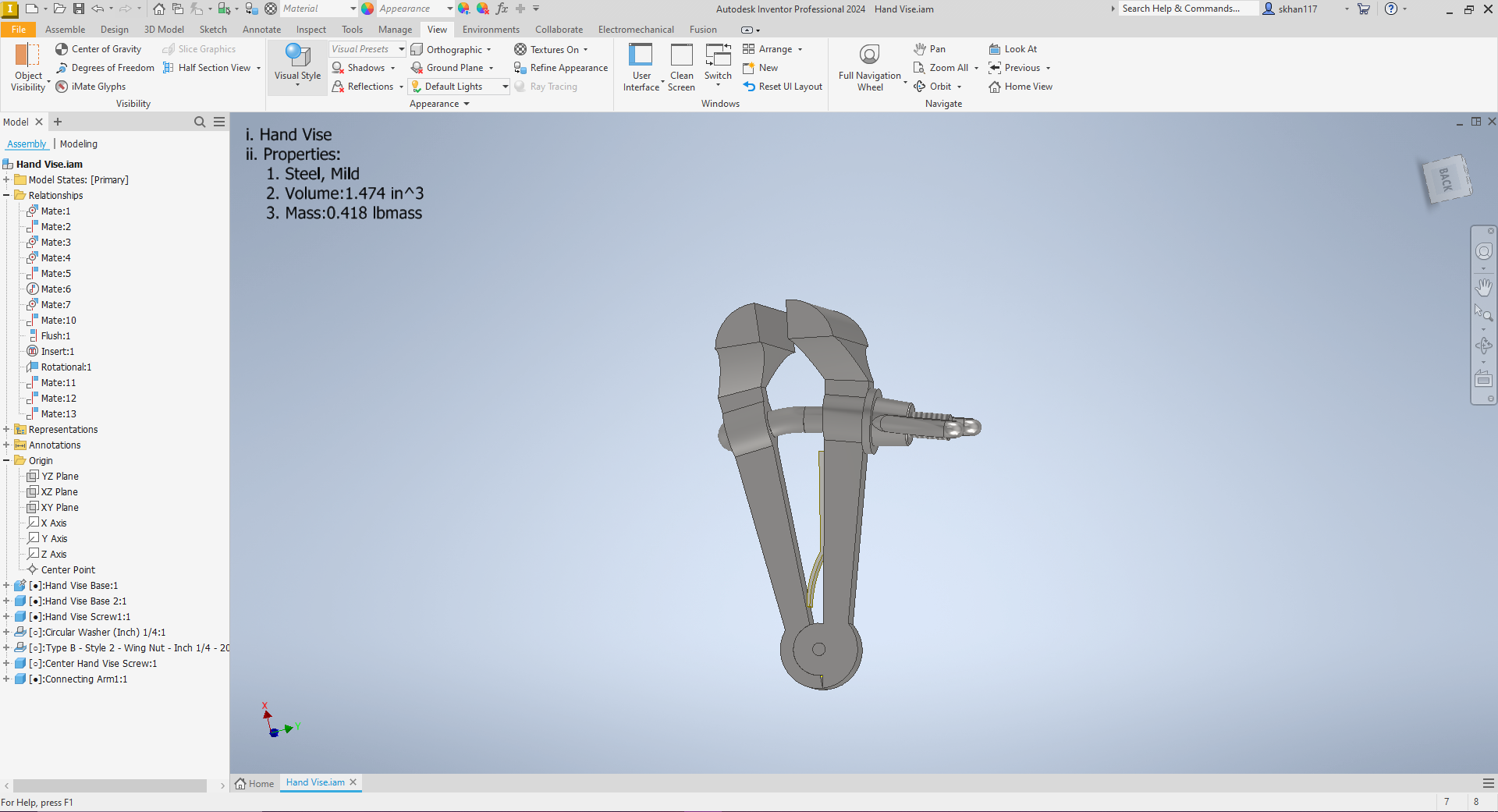
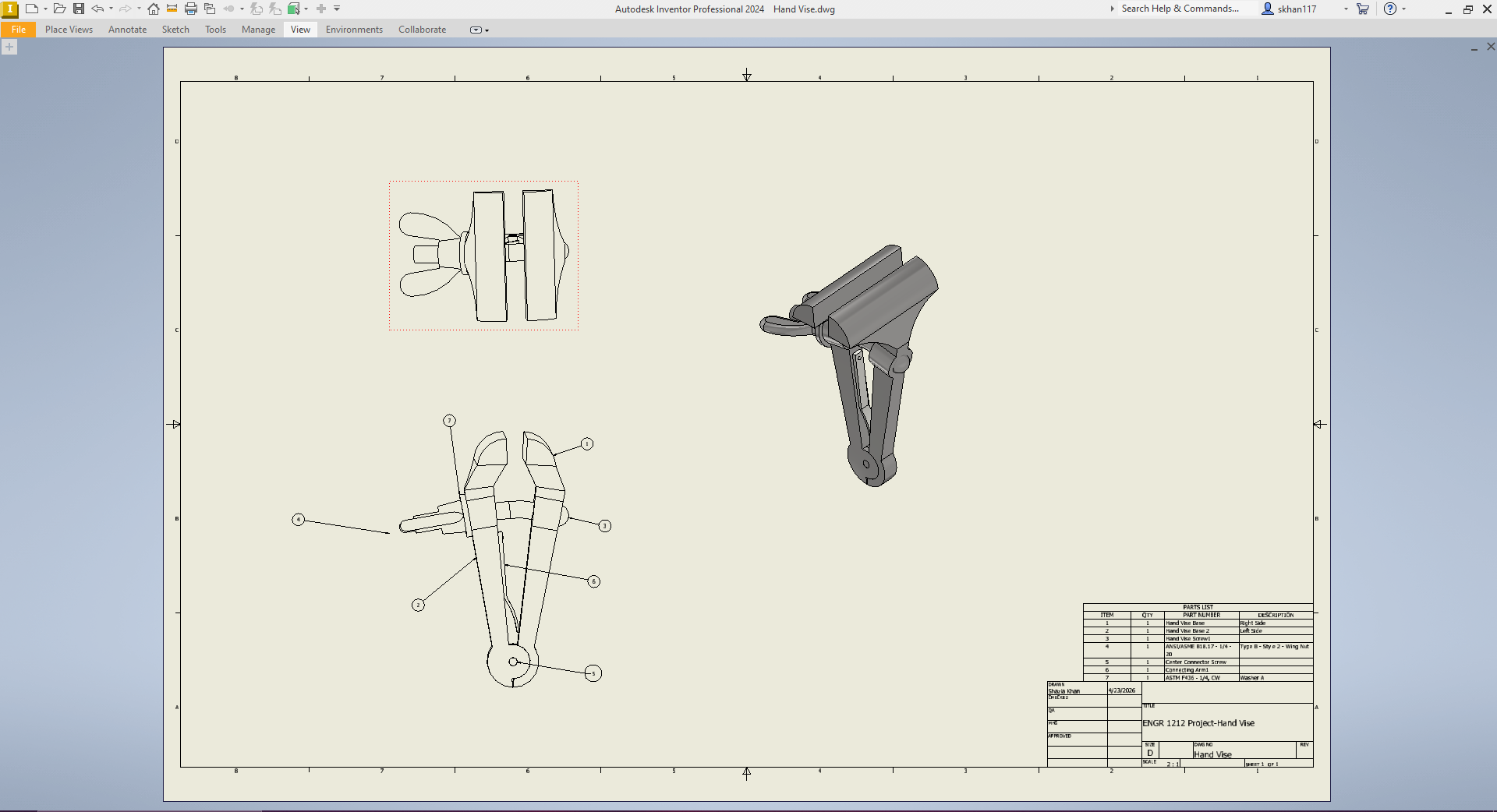
This project involved designing and assembling a fully functional hand vise in Autodesk Inventor using parametric modeling techniques and assembly constraints. The goal was to create a realistic mechanical model that accurately represented the motion and interaction between components such as the jaws, lead screw, wing handle, and spring arm while maintaining proper alignment, fit, and degrees of freedom. Throughout the project, I developed a deeper understanding of advanced CAD workflows including multi-part assembly creation, feature organization, constraint management, motion relationships, and component integration.
I also performed a static stress analysis on the hand vise to evaluate its structural performance under a simulated clamping load. By applying material properties, fixed constraints, and pressure loads, I analyzed von Mises stress, displacement, and safety factor results to identify high-stress regions and assess the design’s structural limitations. This project strengthened my skills in mechanical modeling, engineering analysis, and design validation, all of which are essential in engineering design and prototyping applications.
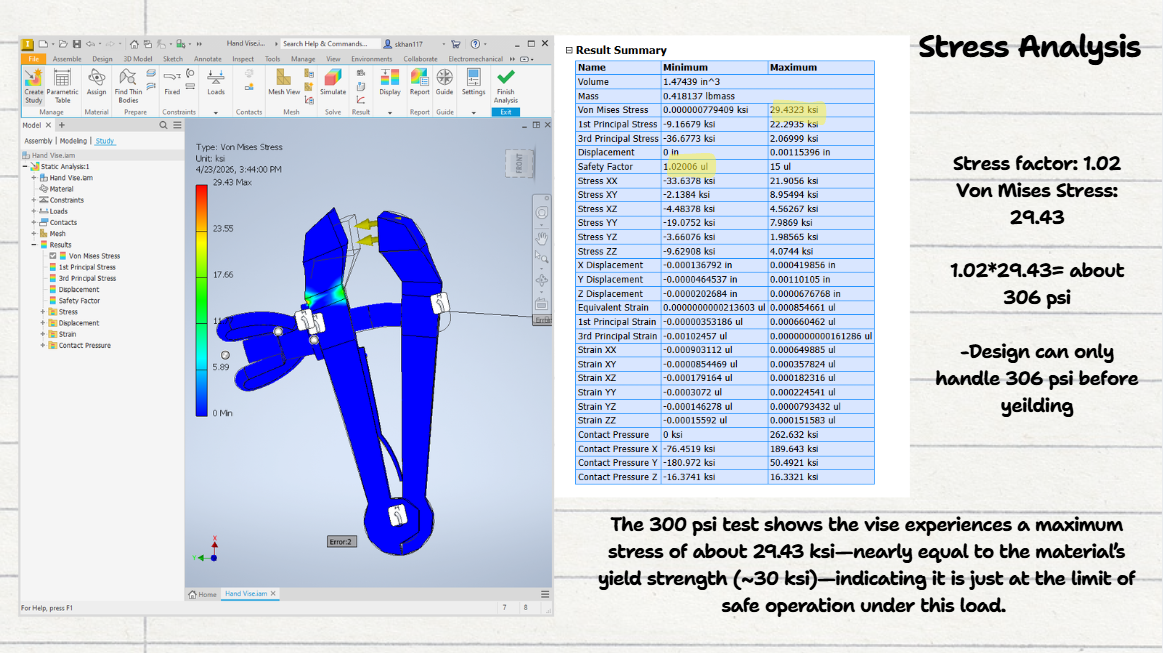
Stress analysis summary page from presentation.
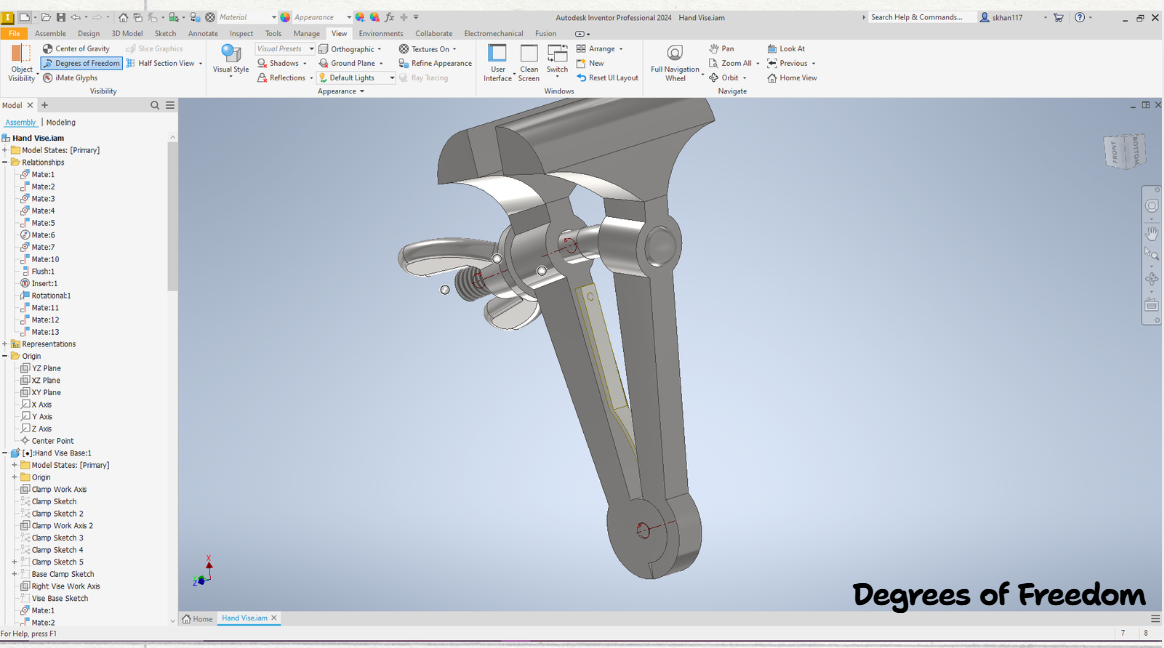
Degrees of freedom; components that rotate on the hand vise.